Sommaire
- Chapitre 1 : Notions fondamentales
- Chapitre 2 : Architecture d'un ordinateur
- Chapitre 3 : Microprocesseur
- Chapitre 4 : Mémoires
- Chapitre 5 : L'architecture Core
- Chapitre 6 : Optimisation : au coeur du core
- Bibliographie
4. Mémoires
Celui qui est courageux en esprit se fait gloire de combattre seul.
La force réside dans l'absence de crainte,
et non dans la quantité de chair et de muscle que nous avons dans notre corps.
Gandhi
Un lien intéressant pour approfondir : Anantech.com
4.1 Introduction
Dans ce chapitre, nous allons rappeler des notions fondamentales concernant la mémoire et nous nous intéresserons en particulier à la mémoire cache.
4.2 Classification
Les différentes mémoires peuvent être classées comme indiqué sur le schéma ci-dessous :
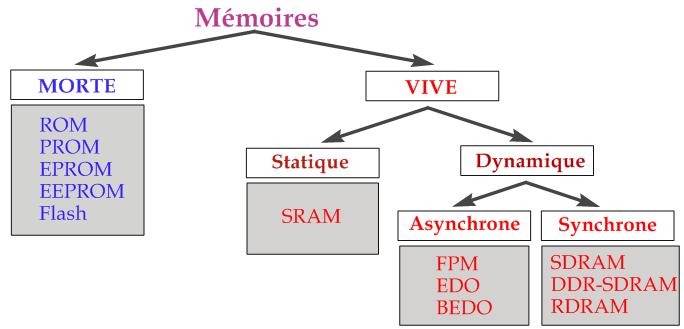
On distingue la mémoire vive (ou RAM) de la mémoire morte (ou ROM).
On peut également donner une autre classification qui tient compte de l'éloignement par rapport au processeur :
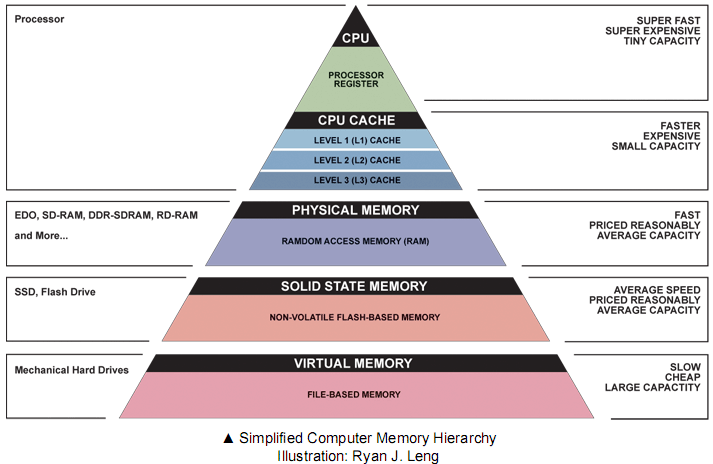
- les registres sont les éléments de mémoire les plus rapides. Ils sont situés au niveau du processeur et servent au stockage des opérandes et résultats intermédiaires.
- la mémoire cache est une mémoire rapide de faible capcité destinée à accéléré l'accès à la mémoire centrale en stockant les données les plus utilisées.
- la mémoire centrale contient les programmes (code + données) et est plus lente que les deux mémoires précédentes.
- La mémoire d'appui est l'équivalent de la mémoire cache pour la mémoire de masse.
- la mémoire de masse est un support de stockage généralement de grande capacité et sert au stockage et à l'archivage des informations.
4.3 La mémoire vive : RAM
La mémoire vive ou RAM (Random Access Memory) pour mémoire à accès aléatoire, est une mémoire volatile, cela signifie que si l'on coupe l'alimentation, les données qu'elle contient sont perdues. Ses caractéristiques sont les suivantes :
- elle sert à stocker les programmes exécutés par le processeur
- elle est accessible en lecture et en écriture
- elle est organisée sous forme matricielle
Il existe deux grandes familles de memoires vives :
- les RAM Statiques : SRAM
- les RAM Dynamiques : DRAM
| Type de mémoire | Temps d'accès | $ / Mo |
| SRAM | 6 à 25 ns | 100 à 250 |
| DRAM | 60 à 120 ns | 5 à 10 |
| Disque Dur | 100 à 200 ms | 0,1 à 0,2 |
4.3.1 La mémoire vive statique : SRAM
Chaque bit d'une SRAM est formé par une bascule (latch) constituée par 4 à 6 transistors. L'information stockée peut être maintenue sans dégradation pendant une centaine d'heures. L'intéret de ce type de mémoire est sa vitesse (quelques ns) mais son cout est prohibitif. En effet, une bascule est composée de deux portes NOR constituée chacune de deux transistors (soit un total de 4 transistors pour un bit d'information). En conséquence on utilisera la SRAM lorsque le facteur vitesse est critique et notamment pour des mémoires de petite taille comme la mémoire cache.
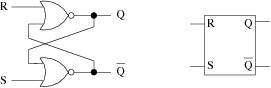
bascule RS constituée de 2 portes NOR
Les mémoires statiques sont composées de bascules. La bascule (latch ou flip-flop en anglais) est composée de deux portes NOR (ou NAND) rétrocouplées, c'est-à-dire que la sortie de l'une est raccordée à l'entrée de l'autre.
Le bascule RS comporte :
- deux entrées notées R (Reset) et S (Set)
- deux sorties désignées par Q et ¬Q qui ont normalement des valeurs inverses.
En fonctionnement normal les entrées R et S sont en position basse (ou à 0). On doit alors mettre une des entrées en position haute (1) pour changer l'état de la bascule. L'étude de la bascule RS montre que :
- la mise à 1 momentanée de S force Q à 1 et ¬ Q à 0
- la mise à 1 momentanée de R force Q à 0 et ¬ Q à 1
- la mise à 1 momentanée de R et S provoque une situation indésirable. Cela provoque la mise à 0 de Q et ¬ Q. Lorsque S et R reviennent en position basse l'état de la sortie est déterminé par la porte qui revient à 0 en premier.
On supposera que le cas R = S = 1, qui consiste à vouloir mettre la bascule à 0 et à 1 ne se produira jamais.
On peut résumer le fonctionnement de la bascule RS par le tableau suivant :
| S | R | Sortie |
| 0 | 0 | inchangée |
| 0 | 1 | Q = 0 |
| 1 | 0 | Q = 1 |
| 1 | 1 | erreur |
4.3.2 La mémoire vive dynamique : DRAM
Chaque bit d'une DRAM est constitué par un transistor et un condensateur :
- le condensateur détermine la valeur du bit : le bit vaut 1 si le condensateur est chargé, il vaut 0 dans le cas contraire.
- le transistor gère l'accès au condensateur
L'inconvénient des DRAM est que le condensateur possède une tendance naturelle à se décharger. Pour que l'information reste cohérente, on va devoir réaliser un rafraîchissement de la mémoire toutes les quelques millisecondes. Ce rafraîchissement consiste à lire et à réécrire la donnée.
Les avantages de la DRAM sont :
- sa grande densité d'intégration (car un bit est représenté par un transistor),
- son faible coût de fabrication,
- sa faible consommation électrique (entre un sixième à la moitié de celle des SRAM).
En revanche le temps d'accès de la DRAM est plus important que celui de la SRAM (environ 50-70 ns).
4.3.3 Mémoires synchrones et asynchrones
- Mémoire asynchrone : pour ce type de mémoire, l'intervalle de temps entre deux accès mémoire consécutif n'est pas régulier. Le processeur ne sait donc pas quand l'information qu'il attend est disponible et doit attendre (wait-state) que la mémoire lui transmette les données.
- Mémoire synchrone : la cadence de sortie des informations est régulière, on évite ainsi les états d'attente (wait state) du processeur.
4.3.4 Comparaison SRAM / DRAM
Etant donné les caractéristiques des SRAM et DRAM, on peut en déduire les propriétés suivantes :
- les DRAM sont plus lentes que les SRAM car durant le rafraîchissement on ne peut accèder aux données
- cependant, les DRAM ont une densité d'intégration plus grande que les SRAM : en effet le coupe transistor + condensateur occupe moins de place que les 4 à 6 transistors des SRAM
En résumé :
- la SRAM est rapide mais chère
- la DRAM est lente mais bon marché
4.4 La mémoire morte : ROM
Les mémoires mortes ou ROM (Read Only Memory) sont des mémoires non volatiles qui sont vouées à être accédées en lecture en fonctionnement normal. Elles contiennent du code et des données qui ne sont pas amenés à changer souvent. Les ROM contiennent généralement les routines d'accès de base aux périphériques.
4.4.1 ROM classiques
L'information contenue dans ces mémoires est enregistrée de manière irréversible lors de la fabrication du circuit. Le principe de réalisation de ces mémoires est le réseau de diodes.
4.4.2 PROM
La mémoire PROM (Programmable ROM) est une ROM à enregistrement irréversible qui peut être programmée par un utilisateur grâce à un dispositif appelé programmateur de PROM.
4.4.3 EPROM et EEPROM
Les EPROM (Erasable Programmable ROM) présentent l'avantage de pouvoir être effacées et réécrites. Pour effacer une EPROM il faut la soumettre à un rayonnement ultraviolets pendant 30 minutes. Elles sont facilement reconnaissables en raison de la présence sur leur face supérieure d'une fenêtre de quartz obturée par un adhésif afin de les soustraire aux rayonnements ultraviolets naturels (soleil, néon).
Les EEPROM (Electrically EPROM) quant à elles utilisent un procédé électrique pour l'effacement des données. Elles sont donc bien plus pratiques que les EPROM.
4.4.4 Flash
Les mémoires Flash réalisent la synthèse des technologies EEPROM et SRAM. Elles sont rapides, ne nécessitent pas de rafraîchissement. Elle sont effaçables et reprogrammables rapidement par blocs de 64 Ko.Malheureusement son prix de revient est assez élevé et on ne peut la reprogrammer qu'un nombre limité de fois (environ 100.000).
4.5 Organisation de la mémoire
4.5.1 Composant mémoire
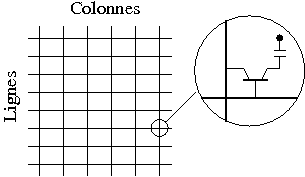
Un composant mémoire peut être considéré comme un tableau à une dimension de cellules mémoires (1 bit). Cependant, comme nous le verrons par la suite, il est plus intéressant d'implanter la mémoire sous forme d'une matrice de cellules (on dit également mots). Un composant mémoire est donc formé de :
- une matrice composée de lignes L et de colonnes C,
- à chaque intersection (ligne,colonne) on trouve des bascules (SRAM), ou des condensateurs-transistors (DRAM).
Organisation d'un composant mémoire
Remarque : un composant de 128 × 128 cellules de 1 bit comporte 16384 bits, on note également : 16 K × 1.
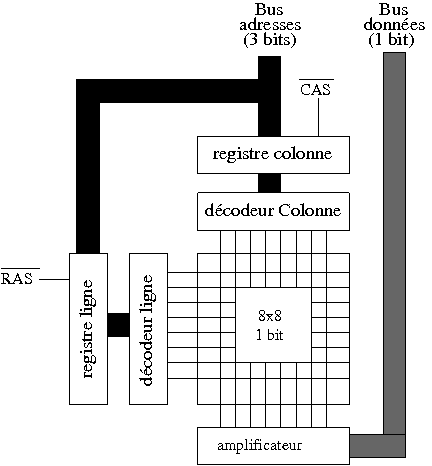
4.5.2 Module mémoire
L'unité de mémoire en informatique est l'octet (8 bits). Pour pouvoir constituer la mémoire en octets on met dans un même boîtier 8 composants 1 bit. Le schéma de la figure ci-dessous donne un exemple de boîtier 4 bits.
Organisation d'un module mémoire 4 bits
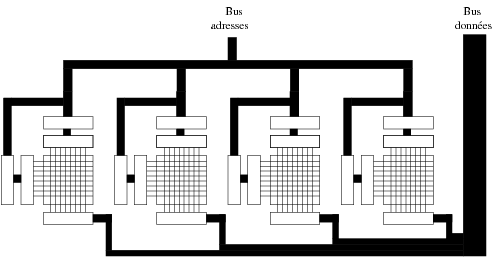
4.5.3 Barette mémoire
Les bus d'adresse des processeurs actuels sont de 64 bits pour les Pentium (32 bits pour les 80486). Pour remplir le bus de données on utilise le même principe que pour les modules mémoires en utilisant des bancs mémoire. Pour un barrette composée de 4 bancs (ou modules) les octets sont stockés modulo 4 :
- le banc 0 contient les octets 0,4,8, ...,
- le banc 1 les octets 1,5,9, ...,
- etc...
Barrette mémoire organisée en bancs mémoire
4.5.4 Extension de la mémoire
Il existe plusieurs manières d'augmenter la capacité d'une mémoire. La méthode la plus simple consiste à créer une matrice plus grande. Par exemple pour doubler la capacité d'un circuit mémoire comportant 2^m cellules il suffit de rajouter une ligne d'adresse. On obtient alors une mémoire de 2^(m+1) mots. L'inconvénient tient au fait que le décodeur doit être augmenté en conséquence et double alors de taille restreignant l'espace attribué à la matrice de bits.
En fait on préfère utiliser des procédés qui consistent à élaborer une mémoire de plus grande capacité à partir de boîtiers déjà existants.
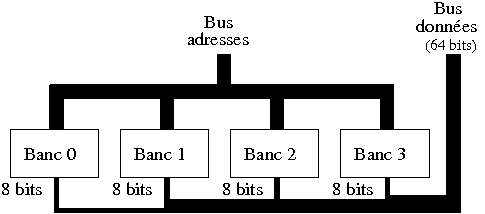
a) Augmentation de l'espace d'adressage
Comme le montre la figure ci-dessous, afin d'obtenir une mémoire de 256 Ko, on peut utiliser 4 boîtiers de 64 Ko. Une adresse mémoire est alors codée sur 18 bits. Les 16 bits de poids faible donnent l'adresse à l'intérieur d'un boîtier et les 2 bits de poids fort donnent le numéro du boîtier à sélectionner.
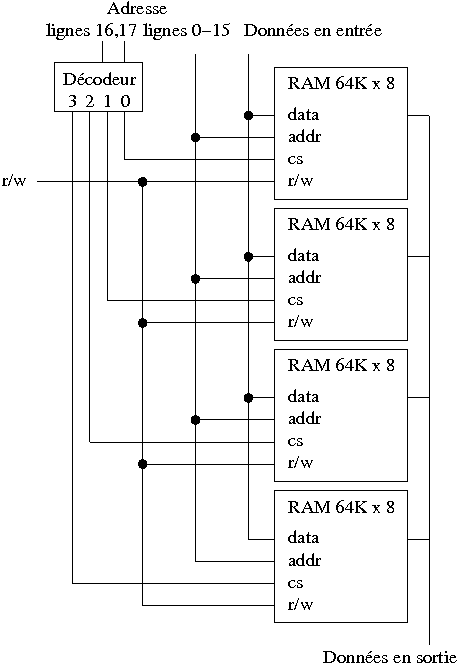
Organisation d'une mémoire de 256 Ko à partir de blocs de 64 Ko
b) Augmentation de la longueur d'un mot
Une autre méthode d'extension de la mémoire consiste à augmenter la longueur d'un mot mémoire. La figure suivante montre comment passer d'une memoire de 64 K mots de 8 bits à une mémoire de 64 K de 16 bits. En fait on a une mémoire de 2 × 64 Ko soit 128 Ko.
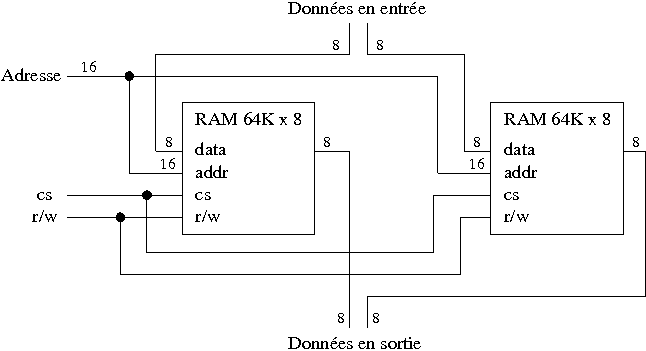
Organisation d'une mémoire de 64 K mots de 16 bits
4.5.5 Alignement
Le microprocesseur Intel 8086 possède :
- un bus d'adresse de 20 bits
- et un bus de données de 16 bits
Son organisation mémoire ressemble à celle de la section précédente. Quand le CPU accède à un mot de 16 bits situé à une adresse paire, on dit qu'il accède à un mot aligné, c'est à dire que les deux octets situés à la même adresse peuvent être lus ou écrits en un seul cycle horloge. Par contre s'il accède à un mot situé à une adresse impaire, c'est à dire un mot non aligné, il lui faut deux cycles horloge.
Le 8086 est conçu pour accéder à des mots alignés ou non.Le fait que le mot soit aligné ou non joue alors sur la vitesse d'exécution de certaines opérations.
4.6 Accès mémoire
Considérons le composant mémoire de la figure suivante :
Organisation d'un composant mémoire
On utilise ici une technique appelée multiplexage d'adresse fondée sur le fait que la mémoire n'est pas conçue sous forme d'un tableau mais d'une matrice de cellules mémoire. Cette technique possède plusieurs avantages que nous allons détailler :
- Si on considère qu'une mémoire de 16384 bits (= 2^14) est représentée sous forme d'un tableau on doit utiliser 14 lignes sur le bus d'adresse. Par contre si on modélise la mémoire sous la forme d'une matrice de 128 × 128 bits on peut alors utiliser deux décodeurs 7 vers 128 (un pour les lignes et un pour les colonnes) mais qui sont beaucoup plus simples (en nombre de lignes de courant et de portes logiques) qu'un seul décodeur 14 vers 16384 (On rappelle qu'un décodeur composé de n entrées comporte 2^n portes AND et n entrées sur chaque porte).
- D'autre part, plutôt que d'utiliser un bus d'adresses de 14 lignes on utilise un bus de 7 lignes sur lequel on envoye le numéro de ligne suivi du numéro de colonne auxquelles on désire accéder. L'intérêt de cette technique consiste à accélérer l'accès aux cellules mémoire. En effet une fois le numéro de ligne stocké dans le registre de ligne, le décodeur de ligne peut commencer à travailler. On envoie ensuite le numéro de colonne sur le bus d'adresses.
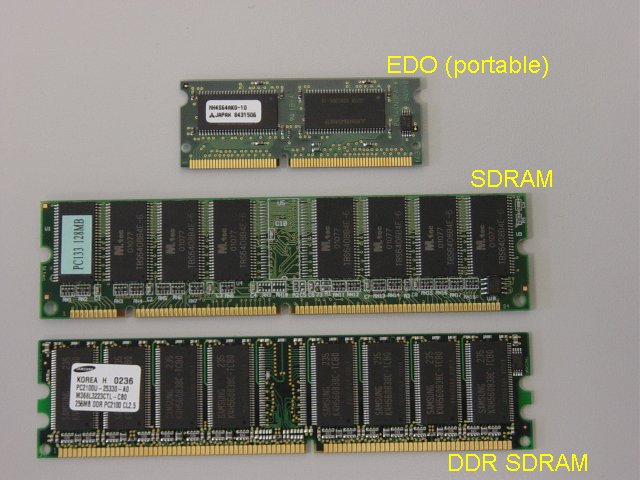
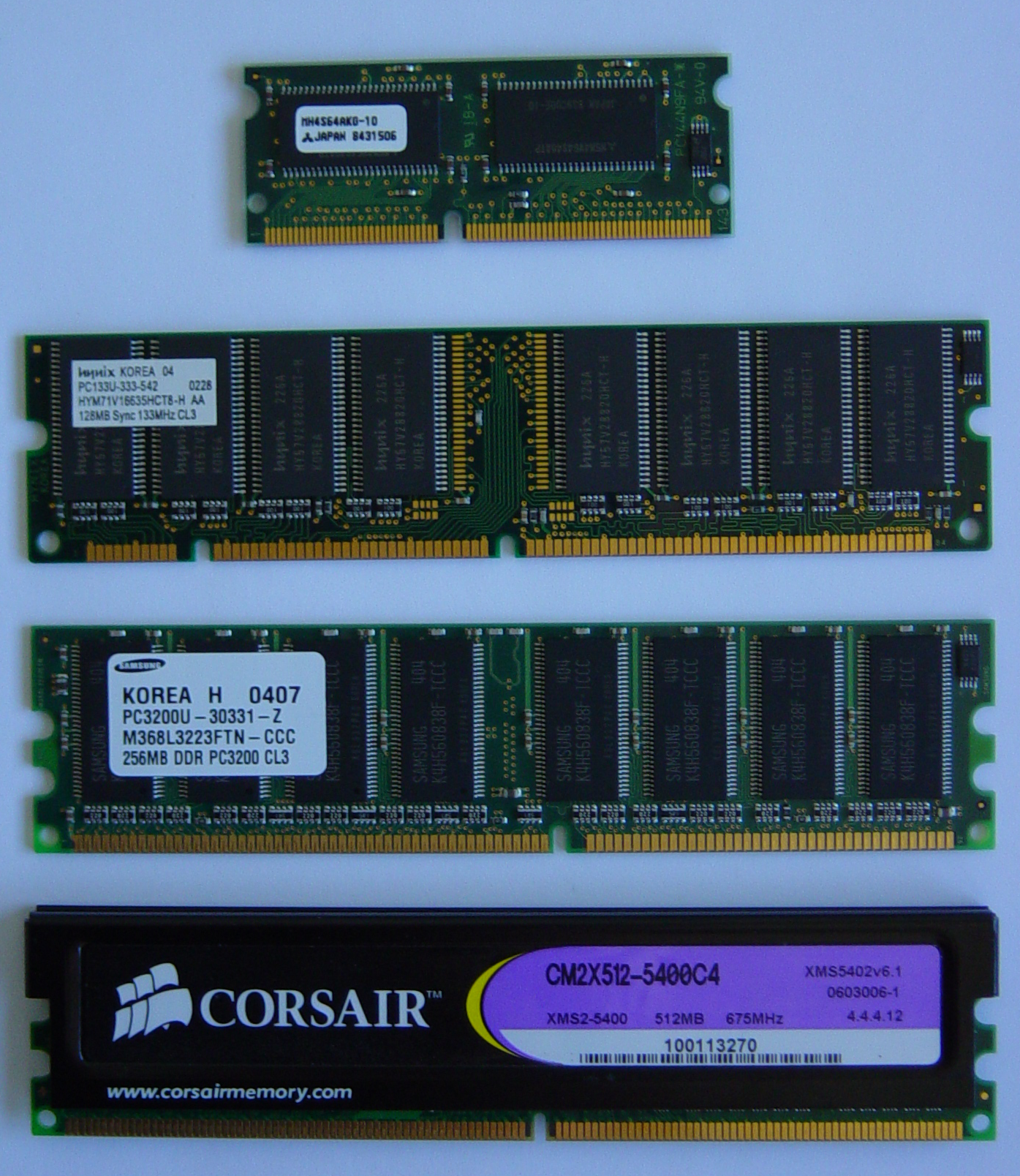
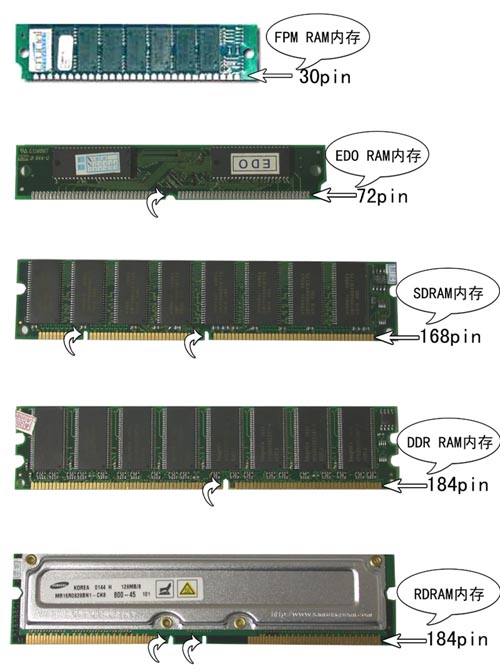
4.7 Les différentes DRAM
| Année | Désignation | Type | Largeur Bus |
| 1987 | Fast Page Mode (FPM) | Asynchronous | 4 ou 8 octets |
| 1990 | Extended Data Out (EDO) | Asynchronous | 4 ou 8 octets |
| 1997 | SDRAM PC 66 | Synchronous | 8 octets |
| 1998 | SDRAM PC 100 | Synchronous | 8 octets |
| 1999 | SDRAM PC 133 | Synchronous | 8 octets |
| 1999 | Rambus PC600/700/800 | Synchronous | 2 octets |
| 2000 | DDR-SDRAM PC 1600 | Synchronous | 8 octets |
| 2001 | DDR-SDRAM PC 2100 | Synchronous | 8 octets |
| 2002 | DDR-SDRAM PC 2700/3200 | Synchronous | 8 octets |
| 2002 | Rambus PC 1066 | Synchronous | 2 octets |
| 2003 | DDR-SDRAM PC 3500/4000/4400 | Synchronous | 8 octets |
| 2003 | DDR2-SDRAM PC 4200 | Synchronous | 8 octets |
| 2007 | DDR3 | Synchronous | 8 octets |
4.7.1 RAM FPM (asynchrone)
la mémoire FPM ( Fast Page Mode) fut utilisée sur les processeurs 80386 et 80486 d'Intel. Elle permet d'améliorer la vitesse de transfert des données en accelérant le transfert de données contiguës.
4.7.2 RAM EDO (asynchrone)
La mémoire EDO (Extended Data Out) est technologiquement identique à la FPM mais consiste en une amélioration logicielle qui permet l'envoi de données pendant le décodage de la prochaine adresse mémoire à accéder.
4.7.3 Mémoire SDRAM (synchrone)
La mémoire SDRAM (Synchronous DRAM) est capable d'échanger des données en se synchronisant avec le signal d'horloge pour des fréquences de 66, 100 ou 133 Mhz. La mémoire est découpée en deux bancs ce qui permet d'accéder à l'un pendant la configuration du second. Cette mémoire est utilisable en mode rafale 2,4,8 ou 512 octets.
4.7.4 Mémoire DDR-SDRAM
La Double Data Rate SDRAM est un standard mis au point par Nec, Samsung et Toshiba. Elle double le taux de transfert des actuelles DRAM en permettant de lire les données sur le front montant et sur le front descendant du signal d'horloge. La DDR SDRAM fonctionne à 100, 133, 150, 166, 200 ou 233 Mhz et est capable d'atteindre des vitesses de transfert de l'order de 1.6 à 4,2 Go/s :
| Norme | Norme JEDEC | Fréquence réelle | Bande Passante |
| DDR-SDRAM PC1600 | DDR 200 | 100 Mhz × 2 | 1,6 Go/s |
| DDR-SDRAM PC2100 | DDR 266 | 133 Mhz × 2 | 2,1 Go/s |
| DDR-SDRAM PC2700 | DDR 333 | 166 Mhz × 2 | 2,7 Go/s |
| DDR-SDRAM PC3000 | DDR 370 | 185 Mhz × 2 | 2,7 Go/s |
| DDR-SDRAM PC3200 | DDR 400 | 200 Mhz × 2 | 3,2 Go/s |
| DDR-SDRAM PC3500 | DDR 433 | 217 Mhz × 2 | 3,5 Go/s |
| DDR-SDRAM PC3700 | DDR 466 | 233 Mhz × 2 | 3,7 Go/s |
| DDR-SDRAM PC4200 | DDR 533 | 266 Mhz × 2 | 4,2 Go/s |
| DDR-SDRAM PC4400 | DDR 550 | 275 Mhz × 2 | 4,4 Go/s |
| DDR2-SDRAM PC3200 | DDR2 400 | 200 Mhz × 2 | 3,2 Go/s |
| DDR2-SDRAM PC4200 | DDR2 533 | 267 Mhz × 2 × 2 | 4,2 Go/s |
| DDR2-SDRAM PC5300 | DDR2 667 | 333 Mhz × 2 × 2 | 5,3 Go/s |
| DDR2-SDRAM PC6400 | DDR2 800 | 400 Mhz × 2 × 2 | 6,4 Go/s |
| DDR2-SDRAM PC8000 | DDR2 1066 | 533 Mhz × 2 × 2 | 8 Go/s |
| DDR3-SDRAM PC3-6400 | DDR3 800 | 400 Mhz × 2 × 2 | 6,4 Go/s |
| DDR3-SDRAM PC3-8500 | DDR3 1066 | 533 Mhz × 2 × 2 | 8,5 Go/s |
| DDR3-SDRAM PC3-10667 | DDR3 10333 | 667 Mhz × 2 × 2 | 10,6 Go/s |
| DDR3-SDRAM PC3-12800 | DDR3 1600 | 800 Mhz × 2 × 2 | 12,8 Go/s |
| DDR3-SDRAM PC3-14900 | DDR3 1866 | 933 Mhz × 2 × 2 | 14,9 Go/s |
| RDRAM PC 800 | PC 800 | 100 Mhz × 4 × 4 bancs | 3,2 Go/s |
| RDRAM PC 1066 | PC 1066 | 130 Mhz × 4 × 4 bancs | 4,2 Go/s |
| RDRAM PC 1200 | PC 1200 | 150 Mhz × 4 × 4 bancs | 4,8 Go/s |
La DDR 550 est apparue en décembre 2003 et elle se révèle donc plus performante que le DDR2 533. L'intérêt de la DDR2 est qu'elle permet une montée en puissance alors que la DDR1 est sensée ne pas pouvoir dépasser un certain seuil de fréquence (bien que sans cesse repoussé).
4.7.5 Mémoire RDRAM ou DRDRAM
La Direct Rambus DRAM développée par la société Rambus grâce au soutien d'Intel représente une amélioration de la DRAM basée sur une architecture à bus très rapide permettant de transférer 16 bits à 800 Mhz. Ce qui lui permet d'atteindre un taux de transfert de 1,6 Go/s si on utilise la technologie Dual-channel. La dernière évolution de la RDRAM, la PC 1200 permet quant à elle d'atteindre une bande passante théorique de 4,8 Go/s. C'est malheureusement une technologie propriétaire qui oblige à verser des royalties à RAMBUS et Intel. D'autre part sa conception est nettement plus coûteuse que celle de la DDR-SDRAM.
| Taille | SDRAM | DDR-SDRAM | DRDRAM |
| 256 Mo | 99 | 90 | 150 |
| 512 Mo | 199 | 150 | 360 |
4.7.6 Mémoire DDR2-SDRAM
La mémoire DDR2 est une évolution de la DDR. Ces deux types de mémoires possèdent des voltages ainsi que des connecteurs différents ce qui les rend incompatibles entre elles.
La mémoire DDR vieillissante est peu à peu remplacée par la DDR2 qui offre une bande passante supérieure.
voir sur le site de Samsung
Diagramme des timings mémoire (Samsung)
| Memory Type | Clock Speed | Name | Bandwidth Single-Channel |
Bandwidth Dual-Channel |
| DDR266 | 133 MHz DDR | PC2100 | 2,100 MB/s | 4,200 MB/s |
| DDR333 | 166 MHz DDR | PC2700 | 2,700 MB/s | 5,400 MB/s |
| DDR400 | 200 MHz DDR | PC3200 | 3,200 MB/s | 6,400 MB/s |
| DDR2 400 | 200 MHz DDR | PC2 3200* | 3,200 MB/s | 6,400 MB/s |
| DDR2 533 | 266 MHz DDR | PC2 4300* | 4,266 MB/s | 8,533 MB/s |
| DDR2 667 | 333 MHz DDR | PC2 5300* | 5,333 MB/s | 10,666 MB/s |
| DDR2 800 | 400 MHz DDR | PC2 6400* | 6,400 MB/s | 12,800 MB/s |
| DDR2 1111 | 1111 MHz DDR | PC2 8888 | 8,888 MB/s | 17,776 MB/s |
Lien intéressant : Corsair
4.7.7 Le Dual-Channel
La technologie Dual-Channel double théoriquement la bande passante : on utilise 2 barrettes mémoires de même capacité et on accède à ces barrettes en 2 × 64 bits (soit 128 bits). En pratique, le gain du Dual Channel n'est que de 5%.
Cependant le dual-channel peut avoir un intérêt dans certains cas. Concernant la parcimonie et la fonction de Fitch. Si on utilise pas de dual-channel, pour une taille du vecteur inférieure à 32768 les temps d'exécution restent cohérents mais augmentent fortement si K > 32768.
Par exemple, avec un Intel Core i5 4570 et une carte mère MSI H87M-G43, on obtient les résultats suivant pour N=512 et K=262144, avec une fonction assembleur SSE2 :
- sans dual-channel: 550s
- avec dual-channel: 348s (-37%)
| K | no DC | theoretical | with DC | gain |
| 4096 | 0.24 | 0.24 | 0.23 | - |
| 8192 | 0.48 | 0.48 | 0.48 | - |
| 16384 | 0.96 | 0.96 | 0.95 | - |
| 32768 | 2.33 | 1.92 | 1.92 | -17% |
| 65536 | 9.32 | 3.84 | 5.42 | -41% |
| 131072 | 27.63 | 7.68 | 17.56 | -36% |
| 262144 | 60.00 | 15.36 | 37.50 | -38% |
On peut voir que pour K >= 32768 le mémoire en dual channel a une influence certaine, dans le cas présent près de 40% de temps d'exécution en moins pour K >= 65536.
4.7.8 Fréquence et débit mémoire
Le débit théorique d'une mémoire d'un ordinateur dépend de trois facteurs :
- la fréquence du bus FSB ( Front Side Bus) reliant le CPU à la mémoire,
- la largeur du bus en nombre de bits,
- un coefficient multiplicateur qui dépend de la technologie utilisée (normal = 1, DDR = 2, QDR = 4).
Le débit mémoire est donc donné par la formule suivante :
debit = Frequence × Largeur × Coef
Exemple : Un ordinateur doté d'un FSB à 133 Mhz de largeur 64 bits utilisant la technologie DDR possède un débit mémoire théorique de : 133 × 64 × 2 bits/s soit 2,128 Go/s.
Exemple : Un Pentium 4 doté d'un FSB à 100 Mhz quad pumped de largeur 64 bits utilisant de la DRDRAM possède un débit mémoire théorique de : 100 × 64 × 4 bits/s soit 3,2 Go/s.
4.7.9 Détection et correction d'erreur
Tout composant électronique est soumis à des erreurs provoquées par des variations de courant électrique, des champs magnétiques ou la chaleur. Les composants actuels sont assez fiables pour ne pas nécessiter de mécanismes de correction d'erreur. Cependant sous certaines conditions il est préférable d'avoir recours à de la mémoire capable de détecter des erreurs (milieu industriel, militaire, spatial). Les mémoires dotées de système de détection ou de correction d'erreur ont des performances similaires aux mémoires classiques (à 2 ou 3 % près).
a) Bit de parité (Parity Checking)
Pour chaque groupe de 8 bits (octet) on ajoute un bit supplémentaire dit bit de parité qui prend la valeur 1 quand il y a un nombre pair de 1 dans le groupe de 8 bits.
A chaque rafraichissement de la mémoire (dans le cas des DRAM) on effectue un contrôle de parité. Si une erreur est détectée on envoie un signal NMI (Non Masquable Interrupt) au CPU qui décide soit d'arrêter la machine, soit de fermer l'application exploitant la zone de donnée erronée.
Cette technique bien qu'intéressante possède cependant deux désavantages :
- les mémoires sont plus difficiles à gérer et donc plus coûteuses,
- on utilise 12,5 % d'espace en plus pour stocker le bit de parité,
- on ne peut pas corriger l'erreur et la détection d'erreur n'est pas totale car si deux bits changent de valeur l'erreur ne sera pas détectée.
b) Correction de code (ECC)
Le principe de l'ECC ( Error Code Correction) consiste à utiliser un algorithme pour corriger les erreurs quand elles sont détectées. Par exemple pour détecter des erreurs sur 64 bits de données on utilise 7 bits ECC qui codent la parité de sous-ensembles de bits de données ce qui permet de détecter une erreur sur un bit mais également de la corriger. En fait on s'arrange pour pouvoir détecter une erreur concerant jusqu'à 2 bits mais on n'est capable de corriger qu'un seul bit. On qualifie parfois la mémoire ECC de SECDED ( Single Error Correction with Double Error Detection).
4.7.10 Informations
Révolution ? PC-Inpact, Septembre 2007
Le New York Times vient d'épingler un chercheur de chez IBM, qui semble bien préparer un gros coup dans le domaine du stockage informatique, Stuart S. P. Parkin. Le petit génie travaille en fait sur un nouveau type de mémoire baptisée « racetrack memory », qui pourrait offrir une densité de stockage 10 à 100 fois supérieures aux densités actuelles, avec une rapidité telle qu'elle pourrait à la fois remplacer la mémoire flash statique, ainsi que la RAM dynamique.
En effet, Parkin affirme que ses travaux pourraient mener à une mémoire « universelle » qui pourrait remplacer les mémoires statiques et dynamiques actuelles. Dans trois à cinq années, il compte déjà remplacer la mémoire flash avec des densités bien plus importantes. La racetrack memory permettra en plus de résoudre le problème de lenteur de la mémoire flash, particulièrement en écriture.
eDRAM - PC Inpact, Fevrier 2007
Le marché de la mémoire ne cesse d'évoluer. IBM vient ainsi de présenter lors de l'International Solid State Circuits Conference (ISSCC) sa nouvelle génération d'eDRAM (embedded Dynamic Random Access Memory), qui selon lui est trois fois plus petite et cinq fois moins consommatrice d'énergie que la SRAM classique.
Disponible au début de l'année prochaine et destinée aux processeurs, cette nouvelle eDRAM dispose d'un temps de latence de 1,5ns et comprend 12 millions de bits. Encore à l'état de prototype, ce produit a pour but de multiplier par trois la quantité de mémoire allouée au CPU, mais aussi de doubler ses performances.
Texas Instrument dévoile la FRAM : BHMag, Mai 2011
Texas Instrument vient d'annoncer la commercialisation d'une technologie de mémoire unifiée susceptible de remplacer rapidement la RAM, l'EEPROM ainsi que les modules Flash.
Il s'agit de la FRAM, ou Ferroelectric Random Access Memory (mémoire ferroélectrique à accès aléatoire)
Non volatile, cette technologie présente l'avantage d'une très faible consommation (trois fois moins que la Flash), rapidité 100 fois supérieure à la moyenne des mémoires Flash, les cycles d'écriture sur un même bloc sont tout simplement inédits : 1014 soit 10 milliards de fois supérieurs à la mémoire flash
Z-RAM - PC Inpact, Février 2007
Un an après l'adoption de la Z-RAM, AMD continuera d'utiliser cette technologie en intégrant la Z-RAM Gen2. Développée par la société suisse Innovative Silicon (ISi), il s'agit tout simplement de la nouvelle génération de Z-RAM (Zero Capacitor RAM), de la DRAM qui a pour particularité de ne pas utiliser de condensateur, mais aussi d'être capable de stocker un bit de données dans une cellule composée d'un seul transistor.
Selon ISi, la Z-RAM Gen2 est bien supérieure à la première génération. Elle serait d'après Mark-Eric Jones, le président de ISi, deux fois plus rapide, et sa consommation serait de 75 % inférieure en lecture et de 90 % en écriture. Une performance atteinte grâce à une production en 45/65nm, contre du 65/90nm pour la première génération de Z-RAM.
DDR 3 - Digital World, Novembre 2006
Samsung Electronics , le numéro un mondial des puces mémoire estime que la troisième génération de mémoires DDR (double data rate) ou DDR3, devrait éclipser les actuelles modules DDR2 à l'horizon 2009.
La mémoire DDR3 promet des performances plus élevées ainsi qu'une consommation réduite par rapport à la DDR2, qui équipe aujourd'hui la plupart des PC modernes. En théorie, un module de mémoire DDR3 devrait consommer environ 40% d'énergie en moins qu'un module DDR2 du fait notamment de l'utilisation d'un processus de gravure en 80 ou 90nm, mais aussi de la réduction de la tension de fonctionnement à 1,5 V contre 1,8 V pour la DDR2. La fréquence des puces DDR3 devrait quant à elle permettre son fonctionnement en conjonction avec un bus système à 1600 Mhz et plus, contre 1333 MHz aujourd'hui.
Selon Samsung, les premiers PC utilisant la DDR3 devrait faire leur apparition au cours du second semestre 2007, vraisemblablement à l'occasion du lancement par Intel de ses nouvelles générations de processeurs - AMD devrait suivre au tout début 2008. La technologie DDR3 devrait devenir la plus utilisée des technologies mémoires en moins de deux ans, Samsung prédisant que les ventes de DDR3 dépasseront celle de la DDR2 vers la fin 2008 ou le début 2009.
PRAM - Clubic, Décembre 2006
Depuis maintenant deux ans, IBM, Infineon et sa filiale Quimonda travaillent à l'élaboration d'un nouveau de type de mémoire qui pourrait, selon eux, venir avantageusement remplacer la mémoire flash telle qu'on la connait aujourd'hui dans les baladeurs ou les cartes mémoire. Ils viennent de présenter les résultats de leurs travaux, qui prennent la forme d'un prototype de mémoire à changement de phase. 500 fois plus rapide que la plus efficace des mémoires flash actuelles, il ne consommerait que la moitié de l'énergie dépensée par une cellule de mémoire flash.
Comme la mémoire flash, la mémoire à changement de phase, ou PRAM (Phase-change Random Access Memory) mise au point par IBM et ses associés est non volatile : elle est donc capable de conserver des données même si elle n'est plus alimentée, contrairement à la DRAM qui équipe nos ordinateurs (mémoire vive). Pour simplifier, la méthode du changement de phase consiste à conserver des données grâce à une modification de la structure de la cellule.
Un bon article par AnanTech : everything you always wanted to know about sdram memory but were afraid to ask
4.8 La mémoire cache
4.8.1 Principe
Il est un fait avéré que les microprocesseurs ont toujours été plus rapides que les mémoires. L'accroissement du temps d'accès des mémoires va de paire avec un accroissement de la vitesse des CPUs et l'écart reste donc constant. L'accès mémoire représente donc un goulet d'étranglement puisque le CPU passe du temps à attendre les informations provenant de la mémoire
On considère en effet que les performances des processeurs doublent tous les 1 an et demi (loi de Moore) alors que celles des mémoires doublent tous les 10 ans.
La résolution du problème n'est cependant pas technologique mais plutôt d'ordre économique. Il est techniquement possible de réaliser des mémoires presque aussi rapides que des CPU mais leur coût de production est relativement onéreux. On préfère donc utiliser des mémoires centrales plus lentes mais de coût raisonnable.
Pour pallier la lenteur relative des mémoires centrales on a recours à une solution matérielle et logicielle nommée mémoire cache ou antémémoire.
Le principe de la mémoire cache est simple : il consiste à stocker dans une mémoire rapide et de faible capacité les données les plus souvent utilisées.
La mémoire cache s'appuie sur deux facteurs :
- localité : on a une forte probabilité d'accéder à la donnée à l'adresse P+1 si on a accédé à la donnée à l'adresse P
- temporalité : on a une forte probabilité d'accéder à la donnée à l'adresse P au temps T+1 si on a accédé à la donnée à l'adresse P au temps T
4.8.2 Niveaux de caches
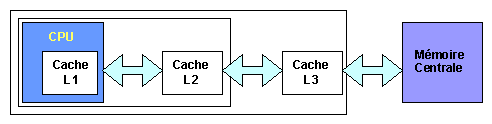
Mémoire cache primaire et secondaire
Les mémoire caches ont évolué pour passer de la carte mère vers le die du processeur.
On distingue en fonction de leur taille et de leur localité :
- la mémoire cache de premier niveau (L1) dont la taille est de deux fois 8 Ko (Pentium) ou deux fois 16 Ko (Pentium Pro). On distingue
- le cache de données L1D
- du cache d'instructions L1I
- la mémoire cache de second niveau (L2) dont la taille varie de 256 à 512 Ko.
- la mémoire cache de troisième niveau (L3) parfois qualifié de LLC (Last Level Cache) dont la taille varie de 6 à 24 Mo.
| Version | Taille L3 |
| Dual Core Itanium 2 9050 |
24 Mo |
| Dual Core Itanium 2 9040 |
18 Mo |
| Dual Core Itanium 2 9030 |
8 Mo |
| Dual Core Itanium 2 9020 |
12 Mo |
| Itanium 2 9010 |
6 Mo |
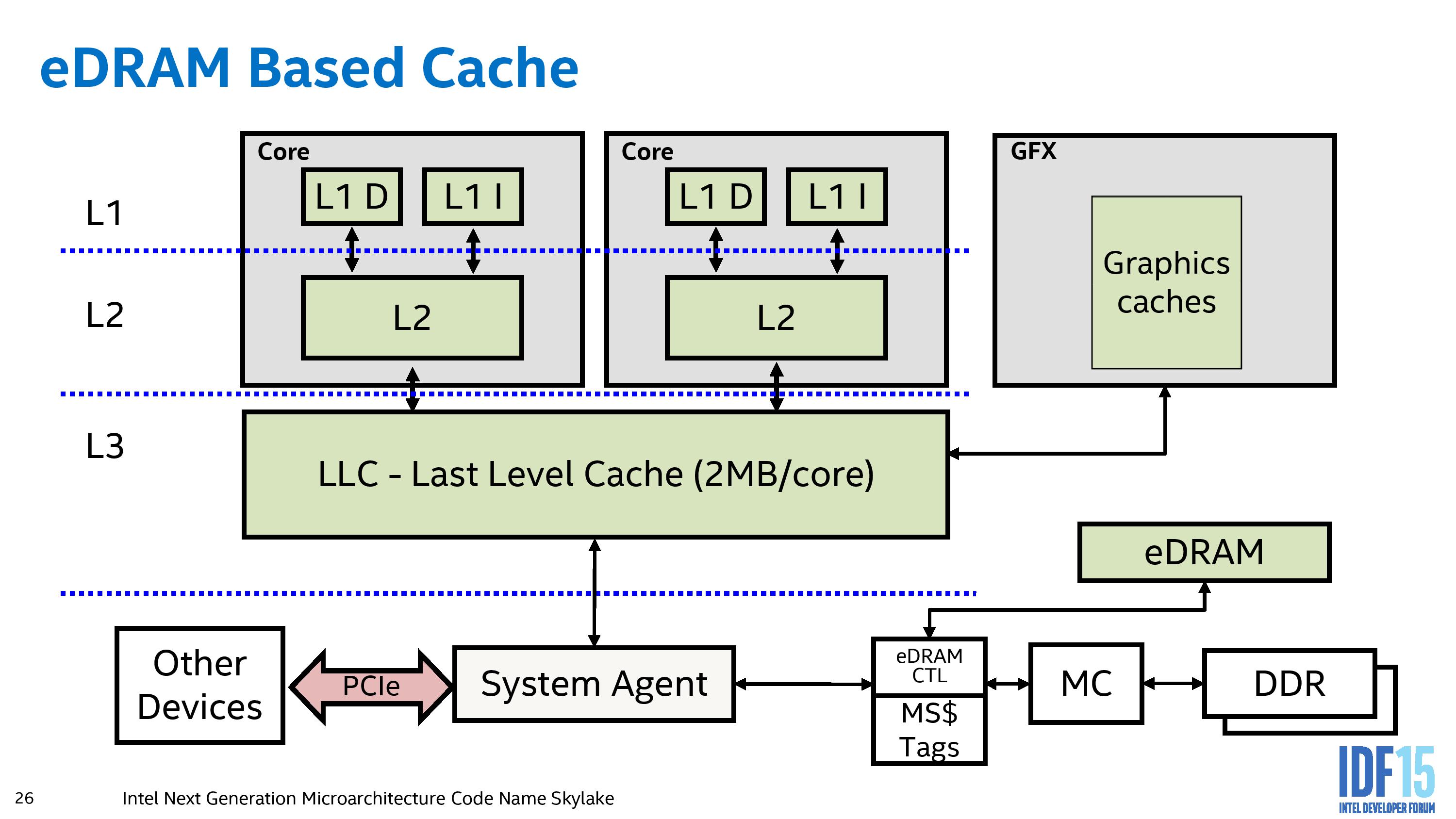
LLC / L4 sur Haswell (4th, 2013) et Broadwell (2014)
Enfin on distingue un cache de niveau L4 introduit par Intel.
Level 4 on-package cache was introduced by Intel starting with their Haswell microarchitecture. The level 4 cache uses, embedded DRAM (eDRAM), on the same package, as the Intel's integrated GPU. This cache allows for memory to be shared dynamically between the on-die GPU and CPU, and serves as a victim cache to the CPU's L3 cache. Any instructions or hardware that requires data from the eDRAM has to go through the LLC and do the L4 tag conversion, limiting its potential (although speeding up certain specific workloads by virtue of a 50 GB/s per-link bi-directional interface.
L4 Cache sur architectures Haswell et Broadwell
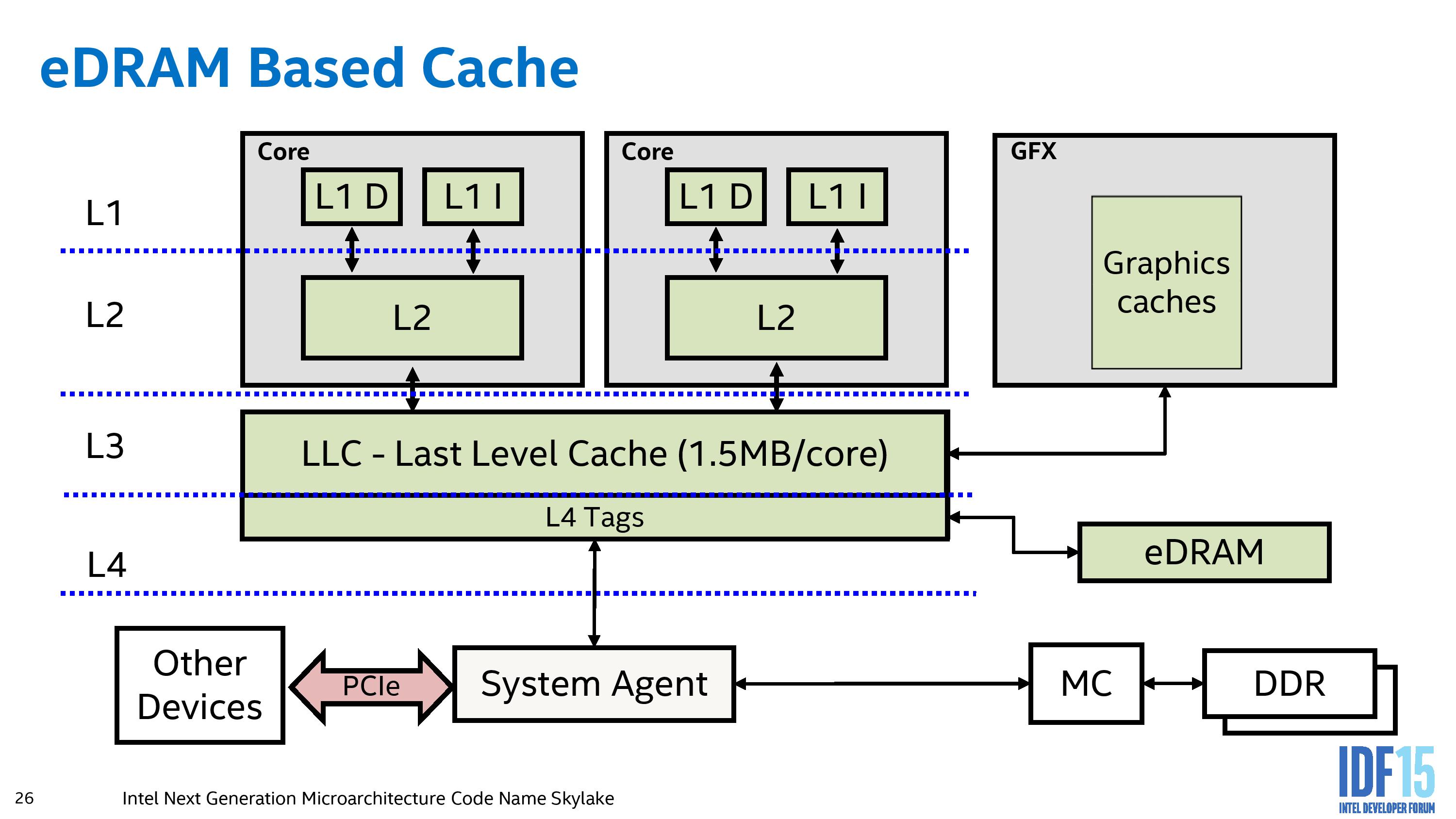
LLC / L4 sur SkyLake (2015, 14nm)
L4 Cache sur architectures Haswell et Broadwell
Rather than acting as a pseudo-L4 cache, the eDRAM becomes a DRAM buffer and automatically transparent to any software (CPU or IGP) that requires DRAM access. As a result, other hardware that communicates through the system agent (such as PCIe devices or data from the chipset) and requires information in DRAM does not need to navigate through the L3 cache on the processor.
4.8.3 Architectures des mémoires caches
On distingue 3 architectures de caches :
- les caches associatifs (fully associative) pour lesquels une adresse peut être stockée n'importe où dans la table. Dans ce cas le champ étiquette n'est pas suffisant pour identifier l'adresse, il faut stocker l'adresse en totalité.
- les caches à accès direct (direct mapping) pour lesquels une adresse sera toujours stockée au même emplacement dans la table. La mémoire centrale étant plus grande que la mémoire cache cela implique que des adresses appartenant à la même classe d'équivalence seront toujours stockées dans la même entrée du cache.
- les caches à accès direct à n groupes ( n-way direct mapping ou set associative qui pallient le défaut du cache direct en permettant de stocker n adresses de la même classe d'équivalence pour la même ligne de cache
Cas des caches à accès direct à n groupes
Une mémoire cache est en fait un dispositif de stockage des données et de repérage de leur emplacement en mémoire. On peut représenter ce dispositif sous forme d'une table comportant au minimum trois champs :
- plusieurs bits indiquant si la ligne de la table est valide ou non
- la donnée à stocker
- un champ permettant d'identifier l'adresse qui est soit l'adresse entière soit une étiquette qui identifie l'adresse réelle à laquelle la donnée se trouve.
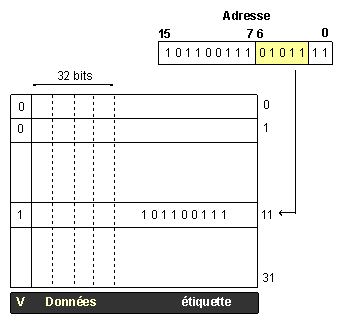
Cache à accès direct de 32 entrées pour des adresses
sur 16 bits et des données sur 32 bits
Un mécanisme simple de décomposition d'une adresse mémoire en deux parties appelées index et étiquette (ou numéro de bloc) est utilisé afin d'identifier l'emplacement référencé par une entrée du cache.
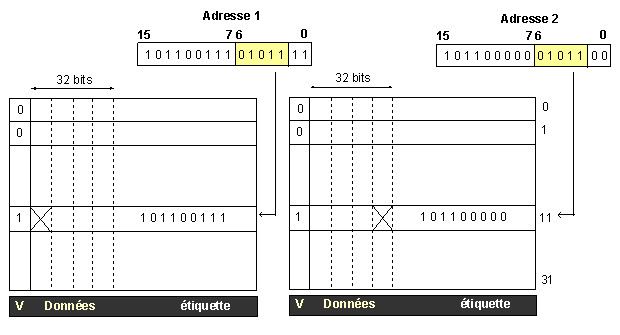
Cache à accès direct à deux groupes
4.8.4 Cohérence des données
Un problème important lié à la mémoire cache concerne la cohérence des données. Si une entrée du cache est utilsée pour stocker une nouvelle donnée, la donnée précédemment stockée doit être mise à jour en mémoire centrale. On peut envisager deux stratégies de mise à jour :
- l'écriture immédiate (write through) consiste à mettre immédiatemment à jour la donnée en mémoire centrale dès lors que sa valeur dans le cache est modifiée.
- l'écriture différée (write back) consiste à mettre à jour la mémoire centrale lors de la modification de l'entrée du cache correspondante.
Un compromis entre coût de production, complexité et performances doit être trouvé lors de la conception d'un cache. Par exemple la stratégie d'écriture immédiate augmente le trafic vers la mémoire centrale. Si la stratégie d'écriture différée pallie ce problème elle en crée un nouveau : en effet, certains circuits d'entrées sorties de type DMA (Direct Memory Access) sont capables de lire ou écrire des données en mémoire sans passer par le processeur et risquent par exemple de lire des données qui ne sont pas à jour. On peut contourner ce problème mais cela augmente la complexité du système.
4.8.5 Cache inclusif ou exclusif
Les caches L1 et L2 fonctionnent en mode :
- inclusif : une donnée peut être stockée à la fois dans L1 et L2. L'espace cache total est alors :
Taille(L1+L2) - Taille(L1) = Taille(L2)
Cette méthode n'a d'intérêt que si le cache L2 est plus grand que le cache L1. On considère que Taille(L2) ≥ 4 × Taille(L1) pour que L2 soit efficace.
-
exclusif : une donnée est stockée soit dans L1, soit dans L2. L'espace cache total est alors :
Taille(L2) + Taille(L1)
L'espace cache est ici plus grand que dans la méthode précédente mais il faut faire en sorte que les données ne soient pas stockées dans les 2 caches à la fois.
AMD utilise un cache L2 exclusif alors qu'Intel utilise un cache inclusif depuis le Pentium Pro. Pour en savoir plus lire l'article suivant AMD K8 Partie 3.
4.8.6 Performances
La performance d'un cache est donnée par le ratio suivant :
perf = Nombre d'accès fructueux / Nombre total d'accès
| Type de cache | Performance |
| Accès direct | 60 à 80 % |
| à n groupes | 80 à 90% |
| Associatif | 90 à 95% |
L'intérêt des caches à accès direct repose sur la vérification rapide de la présence ou non dans le cache d'une adresse. Pour un cache associatif la recherche est beaucoup plus complexe : le but du cache étant l'accès rapide aux données on doit éviter une recherche linéaire sur chaque entrée du cache afin de vérifier la présence d'une adresse. On utilise donc des circuits spécialisés qui comparent simultanément toutes les entrées du cache. Le cache associatif est donc complexe à mettre en oeuvre et en conséquence beaucoup plus coûteux que le cache à accès direct. Cependant le cache associatif présente un taux de succès plus élevé que le cache à accès direct pour lequel un nombre limité d'adresses appartenant à la même classe d'équivalence se trouve dans le cache.
| Pentium 4 (Prescott) |
Pentium D (Presler) |
Core Duo (Yonah) |
Core 2 Duo (Conroe) |
Ahtlon 64 X2 (Windsor) |
AMD FX-8530 (Vishera) |
|
| L1 Instructions | 12k micro-op 8-way |
12k micro-op 8-way |
32 ko 8-way |
32 ko 8-way |
64 ko 2-way |
64 ko 2-way |
| L1 Données | 16 ko 8-way |
16 ko 8-way |
32 ko 8-way |
32 ko 8-way |
64 ko 2-way |
16 ko 4-way |
| Latence L1 (cycles) | 3 | 4 | 3 | 3 | 3 | 4 |
| L2 | 1 Mo 8-way |
2 x 2Mo 8-way |
2 Mo 8-way partagés |
4 Mo 16-way partagés |
2 x 512 ko 16-way |
2048 ko 16-way |
| Latence L2 (cycles) | 31 | 31 | 14 | 14 | 20 | 20 |
| Processeur | L1 | L2 | L3 | Main Memory |
| AMD FX-3850 (4 Ghz) 2012 | 4 | 20 | 76 | ? |
| AMD FX-8150 (3.6GHz) | 4 | 21 | 65 | 195 |
| AMD Phenom II X4 975 BE (3.6GHz) | 3 | 15 | 59 | 182 |
| AMD Phenom II X6 1100T (3.3GHz) | 3 | 14 | 55 | 157 |
| Intel Core i5 2500K (3.3GHz) | 4 | 11 | 25 | 148 |
| Intel Core i7 3960X (3.3GHz) | 4 | 11 | 30 | 167 |
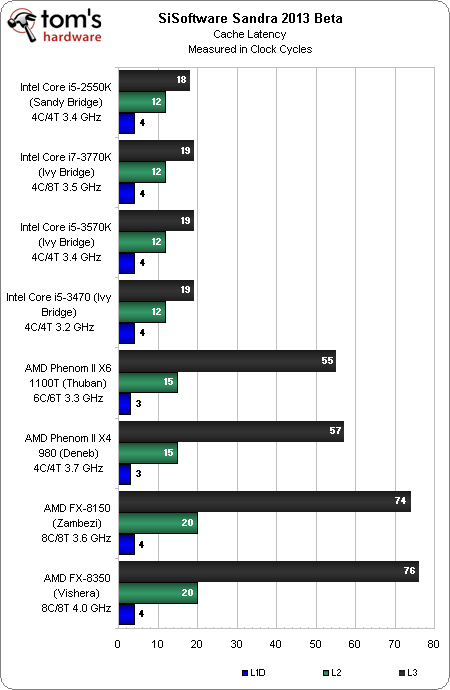
Tiré de Tomshardware.com
4.8.7 Evolution de la taille du cache
Evolution de la taille du cache L2 au cours du temps pour les processeurs Intel
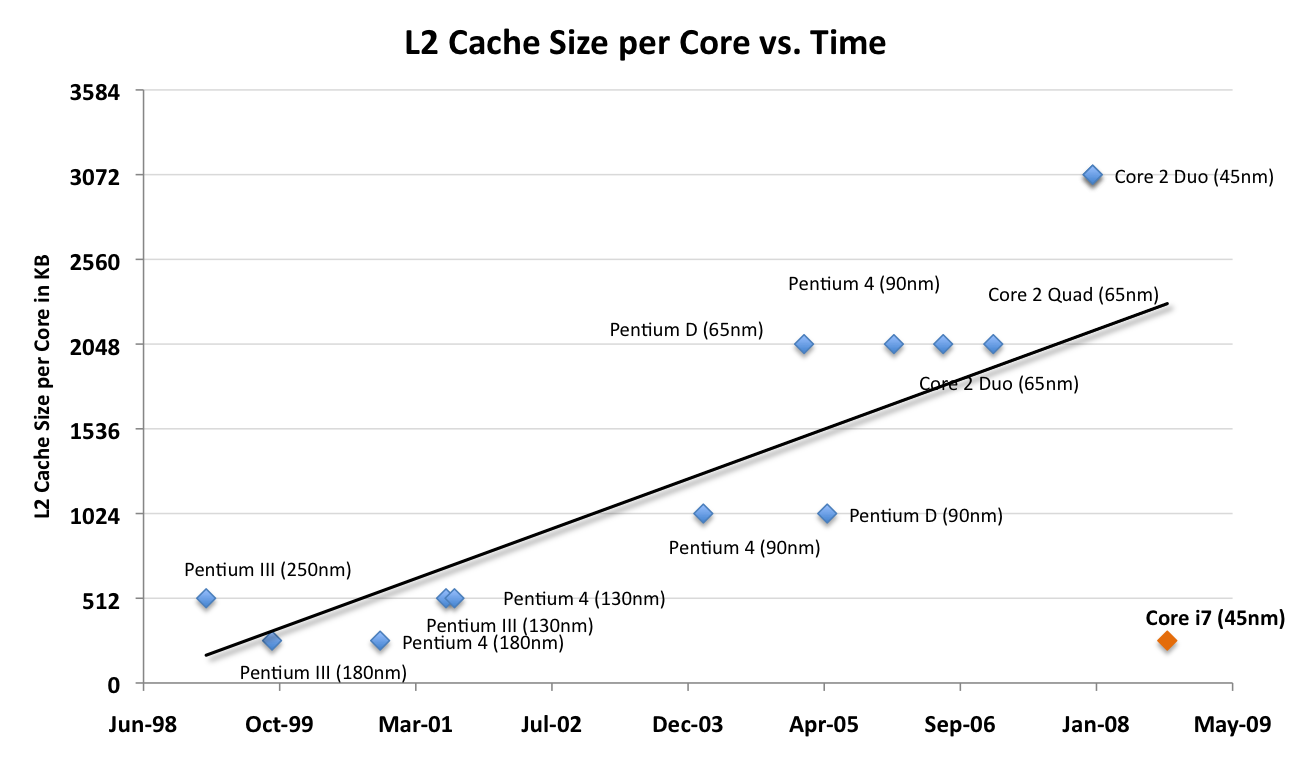
(Source AnandTech.com)
Evolution de la taille du cache L2 au cours du temps pour les processeurs Intel
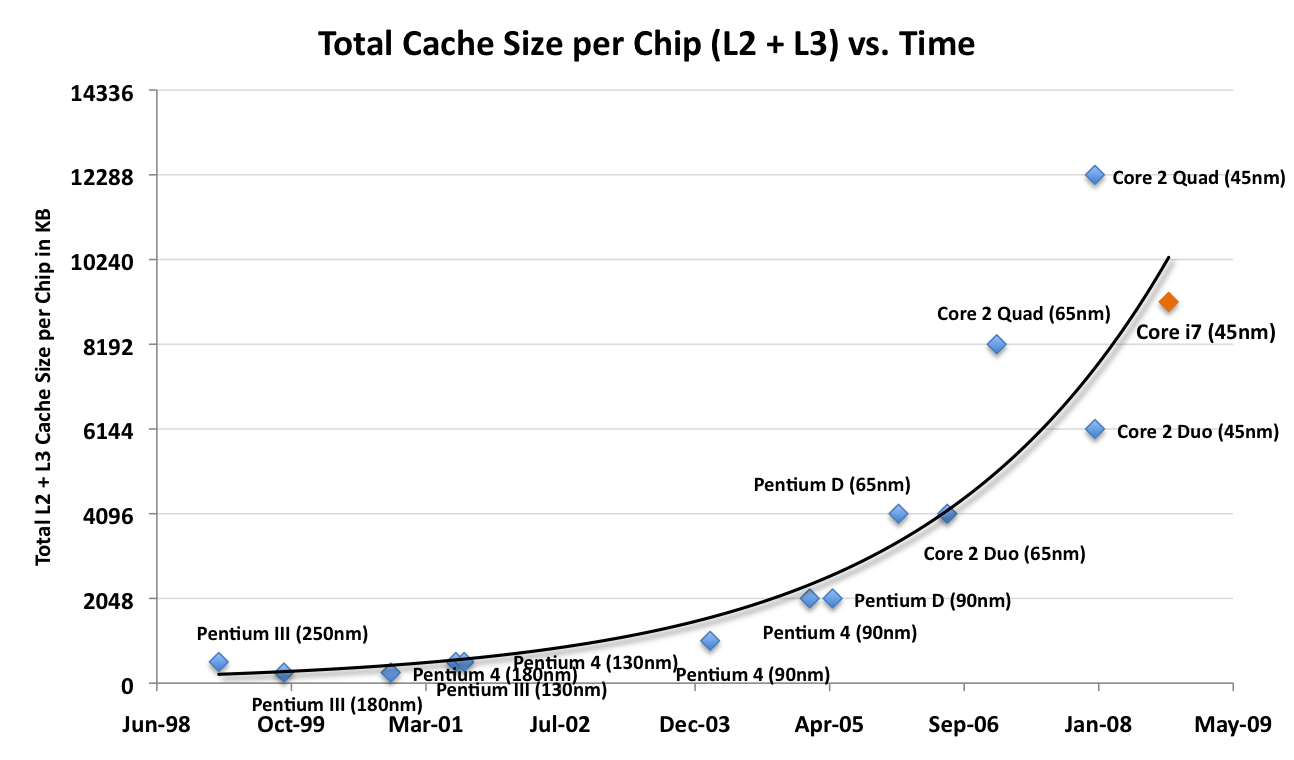
(Source AnandTech.com)
L'arrivée des processeurs multi-coeurs a modifié les besoins en cache L2/L3 :
- avec un coeur on tente de posséder des caches L1, L2 de plus en plus grands et performants
- avec plusieurs coeurs, il faut alimenter de manière équivalente tous les coeurs, d'où un cache L3 de plus en plus grand, alors que le cache L2 peut diminuer (cas du Gulftown : 256 ko L2, 12 Mo L3)
4.8.8 Cache et programmation
a) Un exemple concret : le produit de matrices
L'utilisation d'un cache n'est pas la panacée. En effet si le fait de disposer d'une mémoire cache laisse à penser au programmeur qu'il peut se décharger de la gestion de la mémoire et en attribuer la gestion au compilateur, certaines désillusions sont à prévoir. Soit par exemple, le morceau de code suivant qui réalise le produit de deux matrices carrées de double de dimension N :
int A[N][N], B[N][N], C[N][N];
for (int i=0; i < N; ++i) {
for (int j=0; j < N; ++j) {
for (int k=0; k < N; ++k) {
C[i][j] += A[i][k] * B[k][j];
}
}
}
L'exécution de ce code sur un Pentium III (Tualatin 1,4 Ghz) pour des valeurs croissantes de N donne :
- N = 800 : 34s
- N = 840 : 22s
Si le calcul pour N=800 est de 34s, il devrait être au moins égal à 34s pour N=840. Pour expliquer ce phénomène il suffit d'étudier les caractéristiques des caches L1 de données et L2 de ce processeur (voir également analyse VTune du chapitre 6) :
| Cache L1 | |
| taille du cache L1 | 16 ko |
| associativité L1-D | 4-way |
| taille d'une ligne L1 | 32 octets |
| Cache L2 | |
| taille du cache L2 | 256 ko |
| associativité L1 | 8-way |
| taille d'une ligne L2 | 32 octets |
b) Cache L1-D
16 ko = 24 × 210 = 214 octets
214 / 4 (way) = 214 / 22 = 212
212 / 32 (octets par ligne) = 212 / 25 = 27 = 127
Il existe donc 127 lignes par cache associatif, une adresse sera donc décomposée sous la forme suivante
| ... | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 7 bits | 5 bits | |||||||||||
| ligne | déplacement | |||||||||||
Une matrice 800 × 800 de double occupe 5_120_000 octets soit 0x4E2000 en hexadécimal. Les trois matrices A, B et C sont stockées aux adresses suivantes :
- A : 0x093D4C00
- B : 0x08EF2C00
- C : 0x08A10C00
On s'aperçoit que les dimensions de matrices qui posent problème correspondent à des défauts de cache concernant les caches L1 et L2.
c) Cache L2
256 ko = 28 × 210 = 218 octets
218 / 8 (way) = 218 / 23 = 215
215 / 32 (octets par ligne) = 215 / 25 = 210 = 1024
il existe donc 1024 lignes par cache associatif, une adresse sera donc décomposée sous la forme suivante :
| ... | | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | | 4 | 3 | 2 | 1 | 0 |
| 10 bits | 5 bits | ||||||||||||||
| ligne | déplacement | ||||||||||||||
Autres dimensions de matrice posant problème :
- (double) 416 : 416 × 416 × 8 = 1.384.448 = 0x152000
- (double) 864 : 864 × 864 × 8 = 5.971.968 = 0x5B2000
- (integer) 1280 : 1280 × 1280 × 4 = 6.553.600 = 0x640000
d) Organisation des données
Afin d'améliorer les performances du cache, on est parfois amené à décomposer les données, on oppose généralement :
- AOS = Array of Structure
- SOA = Structure of Array
// AOS - 1400 bytes (3 x 4 + 2) x 100
struct {
int a, c, e;
char b, d;
} array_of_struct [100];
// SOA - 1400 bytes
struct {
int a[100], c[100], e[100];
char b[100], d[100];
} struct_of_array;
// SOA découpée en deux parties
struct {/* 1200 bytes */
int a, c, e;
} hybrid_struct_of_array_ace[100];
struct {/* 200 bytes */
char b, d;
} hybrid_struct_of_array_bd[100];
Il est également préférable d'utiliser des structures de données alignées sur des bloc de 4, 8, 16 ou 32 octets :
// structure sur 7 octets
typedef struct { short x,y,z; char a; } Type;
// ajout d'un champ pour aligner sur 8 octets
typedef struct { short x,y,z; char a;
char dummy; } Type;
4.9 La mémoire de masse
4.9.1 Le disque dur (hard drive)
Le disque dur est l'un des composants (ou périphérique) de l'ordinateur servant à conserver les données de manière persistante, contrairement à la mémoire vive, qui est volatile. On qualifie également les média de stockage de grande capacité de mémoire de masse.

4.9.2 Organisation interne
Un disque dur est constitué d'un ou plusieurs plateaux d'une taille de 3"1/2 ou 2"1/2 entre lesquels passent des têtes de lecture/écriture solidaires d'un bras qui autorise le déplacement des têtes sur toute la surface du disque.
Les plateaux tournent à une vitesse de 4200, 5400, 7200, 10000, 12000 ou 15000 tr/min.
Plus la vitesse de rotation est importante, plus le disque est performant.

4.9.3 Principe de lecture / écriture
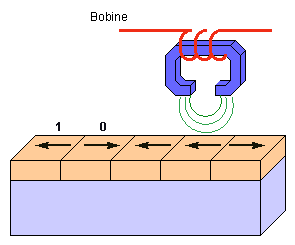
On utilise un matériau dur sur lequel on dispose une couche d'oxyde de fer. La tête de lecture/écriture est composée par un aimant autour duquel est enroulée une bobine.
- Pour écrire :
on fait passer un courant électrique dans la bobine ce qui crée un champ magnétique. Les lignes de champ magnétique traversent la couche d'oxyde et orientent celui-ci en créant de petits aimants dont le sens est donné par le sens du courant dans la bobine.
- Pour lire :
on fait passer la tête de lecture/écriture sur le support magnétisé qui crée un courant induit dans la bobine dont le sens indique s'il s'agit d'un 0 ou d'un 1.
Il faut faire attention à ce que la tête de lecture ne touche pas la couche d'oxyde sinon elle risquerait de l'endommager. En fait la vitesse de rotation du disque donne naissance à un phénomène de sustentation. Lors de l'arrêt de l'ordinateur on déplace les têtes sur une piste appelée landing track qui peut sans problème être endommagée puisqu'elle ne contient pas de données.
|
La miniaturisation des zones de stockages engendre des problèmes comme l'effet super paramagnétique pour lequel chaque élément possède une influence sur ses voisins et peut même dans certains cas conduire à modifier la valeur des voisins. Ce problème est du à l'enregistrement horizontal des données. Pour remédier à ce problème on a introduit une technique qui permet un enregistrement vertical (encore appelé perpendiculaire) ce qui permet d'accroître la capacité des disques durs. (Hitachi prévoit qu'en 2007 on disposera de disques durs 3,5 pouces d'1 To) |
|
4.9.4 Formatage
Il existe deux types de formatages :
- le formatage de bas niveau dit formatage physique
- le formatage de haut niveau dit formatage logique
- Formatage de bas niveau
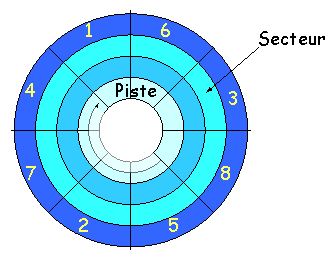
Le formatage de bas niveau a pour but d'organiser la surface du disque en éléments simples : pistes (cylindres), secteurs qui permettront de localiser l'information.
Le formatage de bas niveau est effectué en usine lors de la fabrication du disque dur.
- Formatage de haut niveau
Le formatage de haut niveau permet d'organiser les pistes (cylindres) et secteurs en un système de fichier qui sera géré par un système d'exploitation (Windows, Linux, Unix, OS2, ...).
Pour formater un disque il faut utiliser la commandeformatsous MSDOS/Windows :
format c:
| Système d'exploitation | Système de fichiers |
| DOS | FAT 16 |
| Windows 95 | FAT 32 |
| Windows NT,XP | NTFS |
| Linux | Ext2, Ext3 |
| OS/2 | HPFS |
a) Cas de la FAT 16
Durant le formatage on crée la FAT (File Allocation Table) qui contient la liste des clusters du disque ou de la partition. On répartit plusieurs secteurs en un cluster qui devient la plus petite unité d'allocation.
Avec une FAT 16, utilisée avec MSDOS, les adresses des clusters sont codés sur 16 bits, soit 65536 clusters différents (en fait 65526 car 10 clusters sont réservés).
- Pour un dique de 512 Mo, la taille d'un cluster est de 2^29 / 2^16 = 8 ko.
- Pour un disque de 4 Go, la taille d'un cluster serait de 2^34 / 2^16 = 256 ko
La FAT 16 permet de gérer des disques d'une capacité n'excédant pas 2 Go.
b) Cas de la FAT 32
La FAT 32 a vu le jour en 1997, elle code les adresses de clusters sur 28 bits (les 4 derniers bits étant réservés). Elle permet de gérer des disques de 260 Mo à 2 To.
| Taille de partition | Taille cluster |
| disquette | 512 octets |
| 260 Mo à 8 Go | 4 ko |
| 8 Go à 16 Go | 8 ko |
| 16 Go à 32 Go | 16 ko |
| 32 Go à 2 To | 32 ko |
4.9.5 Partitionnement
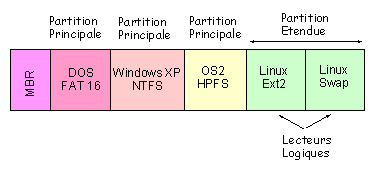
Le partitionnement est effectué avant le formatage de haut niveau et permet de placer plusieurs systèmes de fichiers différents (donc plusieurs systèmes d'exploitation) sur le même disque. Le partitionnement peut également servir à séparer programmes et données.
Il y a 3 sortes de partitions :
- les partitions principales
- la partition étendue
- les lecteurs logiques
Un disque peut contenir au maximum 4 partitions principales dont une seule est dite active (c'est elle qui permettra de démarrer la machine avec le système d'exploitation par défaut).
On peut également organiser le disque en 3 partitions principales et une partition étendue. Dans ce cas la partition étendue peut être subdivisée en lecteurs logiques
Le secteur de démarrage (appelé Master Boot Record ou MBR en anglais) est le premier secteur d'un disque dur (cylindre 0, tête 0 et secteur 1), il contient la table de partition principale et le code qui, une fois chargé en mémoire, va permettre d'amorcer le système (booter).
Pour partitionner un disque on peut utiliser :
- la commande
fdiskavant d'installer un système d'exploitation - ou des utilitaires comme Partition Magik.
Le MBR contient toutes les informations relatives au disque dur (fabricant, numéro de série, nombre d'octets par secteur, nombre de secteurs par cluster, nombre de secteurs,...). Ce secteur est donc le secteur le plus important du disque dur, il sert au setup du BIOS à reconnaître le disque dur. Lorsqu'il est endommagé ou effacé par un virus votre disque dur est inutilisable.
4.9.6 Grandeurs caractéristiques et performances
a) Capacité
Connaissant :
- le nombre de cylindres (C) (= nombre de pistes)
- le nombre de têtes de lecture/écriture (H)
- le nombre de secteurs par piste (S)
On peut calculer la capacité d'un disque dur :
capacité = C x H x S x 512 octets
Les capacités des disques durs actuels varient de 40 Go à 1 To.
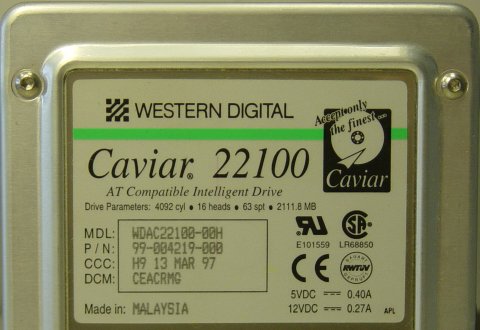
Remarque : les constructeurs donnent généralement la taille des disques durs en divisant la capacité par 1000 au lieu de 1024. Par exemple pour un disque de caractéristiques C=4092, H=16, S=63, la taille devrait être de 2014 Mo, or on indique 2111 Mo.
b) Taux de transfert
Le taux de transfert indique le nombre de ko que l'on peut transférer en une seconde.
| Disque | Capacité | Vitesse de rotation (tr/min) |
Tx de Transfert maximum (Mo/s) |
Temps d'accès (ms) |
| Hitachi HTS548060M | 60 Go | 5400 | 31 | 18,4 |
| Hitachi Travelstar | 40 | 4200 | 10 | 18,8 |
| Maxtor Diamond Max Plus | 160 | 7200 | 56 | 15,5 |
c) Temps de latence
Le temps de latence correspond à l'intervalle de temps entre le moment ou la tête de lecture/écriture trouve les données étant placée sur la piste adéquat. Le temps de latence est donné par la formule suivante :
Tlatence = (60 / vitesse de rotation ) / 2
Pour un disque tournant à 10000 tr/min le temps de latence est de 3 ms.
d) Temps d'accès
Temps nécessaire au passage sur la piste suivante
e) Temps moyen d'accès
Intervalle de temps entre la réception d'une requête et la mise à disposition des données.
f) Fabricants de disques dur
4.9.7 Les Solid State Disks (SSD)
Fin 2008, les SSD commencent a devenir abordables mais restent encore chers.
Le principe de fonctionnement des SSD repose sur l'utilisation de mémoire Flash qui a tendance à s'user à force de lecture/écriture :
- la mémoire Flash NAND : l'accès est réalisé en série et ce type de mémoire se montre intéressant pour la lecture/écriture de fichiers de grande taille
- SLC (Single-Level Cell) : stockage d'un bit par cellule, faible consommation, taux de transfert élévé : 100.000 cycles avant usure
- MLC (Multi-Level Cell) : stockage de deux bits par cellule : 10.000 cycles avant usure
- la mémoire Flash NOR : adaptée à des accès aléatoires
On utilise généralement de la Flash NAND car sa densité de stockage est plus grande.
| Critère | DDM | SSD |
| Consommation | importante / moyenne | faible |
| nuissance sonore | importante / moyenne | nulle |
| lecture | moyenne | rapide |
| écriture | moyenne | lente |
| cycles | très importants | 100.000 / 10.000 |
| Prix | moyen | très élevé |
Voici quelques prix (CDIscount, Octobre 2008)
- Western Digital 1 To, SATA II 3.0 Go/s, 16 Mo Cache, 7200 trs/min : 95 € (0,095 €/Go)
- Western Digital 500 Go, PATA 100, 16 Mo Cache, 7200 trs/min : 71 €
- OCZ SSD 32 Go SATA II, 150 €
- SuperTalent 120 Go, SATA II MLC : 384 € (3,2 €/Go)
Prix (CDiscount) Novembre 2010
| Marque / Modèle | Capacité | Format | Ecriture | Lecture | Prix | Prix / Go |
| Patriot | 200 Go | 2,5" | 275 Mo/s | 285 Mo/s | 774 &euro | 3,87 &euro / Go |
| OCZ Colossus | 250 Go | 3,5" | 230 Mo/s | 260 Mo/s | 749 &euro | 3,00 &euro / Go |
| Samsung F2EG Eco Green | 2 To | 3.5" | 5400 tr/min | 112 &euro | 0,056 &euro / Go | |
quelques liens
- Le point sur les SSD (BHMag) (23/09/2010)
- Les disques SSD, la fin des disques durs (PresencePC) (18/05/2007)
4.9.8 News
- 14 Octobre 2006
Fujitsu commercialisera prochainement des portables qui utiliseront de la mémoire flash à la place des disques durs traditionnels. Des capacités de stockage de 16 et 32 Go seront proposées en option avec les prochaines séries B et Q commercialisées début novembre (530 &euros; environ l'option 16 Go, 1067 &euros; le 32 Go). Ces disques, fabriqués par Samsung, sont déjà intégrés dans l'ultra-portable Q30 et dans l'UMPC Q1, vendus en Corée du sud depuis plusieurs semaines ... lire la suite
4.10 CDRom, DVDRom et Blu(e) Ray
CDRom, DVDRom et disque BluRay (ou BlueRay) sont trois déclinaisons de la même technologie qui repose sur la lecture et l'écriture grâce à un laser.
4.10.1 Caractéristiques
Le Compact Disc a été inventé par Sony et Philips en 1981 dans le but de fournir un support audio et vidéo de haute qualité.
- En 1984, les spécifications techniques du CD ont été étendues afin de permettre le stockage de données
- En 1990 Kodak met au point le CD-R (pour Réinscriptible) ou inscriptible une fois.
- En 1993 est mise au point la norme Vidéo-CD qui permet de stocker 74 min de vidéo sur un CD.
- un CD est capable de stocker 650 ou 700 Mo de données et 74 ou 80 min de musique.
- Le taux de transfert d'un CD-ROM est de 150 ko/s, mais on peut atteindre jusqu'à 7200 ko/s (48X)
Un CD-ROM est un disque de 12 cm de diamètre composé de plusieurs couches :
- une couche de polycarbonate laissant passer la lumière
- une couche métallique réfléchissante (or ou argent) composée de plats et de creux
- une laque anti-UV
L'organisation du CD n'est pas la même que celle des disques durs. On a ici une seule piste principale gravée en spirale (d'une longueur de 5,77 km).
4.10.2 Principe de lecture écriture
Plusieurs techniques existent en fonction du type de CD : CD-ROM, CD-R, CD-RW.
Le principe de lecture/écriture utilise un rayon laser (Light Amplification by Stimulated Emission of Radiation) infrarouge d'une longueur d'onde de 780 nm.
a) Lecture
Elle consiste à mesurer le déphasage entre l'onde incidente et l'onde réfléchie. Lorsque le laser rencontre un creux il se crée un déphasage que l'on peut mesurer.
De manière un peu plus schématique (et un peu éloignée de la réalité) on peut concevoir que lorsque la lumière rencontre un plat, l'onde incidente est totalement réfléchie. Par contre, lorsque la lumière rencontre un creux, seule une partie est réfléchie. On peut mesurer l'intensité du rayon réfléchi afin de déterminer si on est dans un creux ou un plat.
b) Ecriture
Pour l'écriture les techniques sont assez similaires qu'il s'agisse d'un CD-R ou d'un CD-RW. Dans le cas d'un CR-R on ajoute une couche de colorant organique. Pour les CD-RW on utilise un alliage métallique. Tous deux ont la propriété de changer d'état devenant plus ou moins opaque (moins réfléchissant) si on les expose à de fortes températures (500 degrés).
Dans le cas des CD-RW le CD peut être effacé en utilisant un laser à 200 degrés.
4.10.3 Graveurs CD
Lors de l'achat d'un graveur de CD, trois coefficients sont fournis :
- la vitesse maximum de gravage des CD-R
- la vitesse maximum de gravage des CD-RW
- la vitesse maximum de lecture des CD
On trouve actuellement des graveurs 52x/24x/52x
Dernière minute : La société MITSUMI vient de mettre au point un graveur 54x/32x/54x.
4.10.4 Le DVD
Le DVD est apparu en 1997 et est principalement dédié à la vidéo. Son format est le même que celui du CD mais il utilise un laser rouge (650 et 635 nm) ce qui autorise une plus grande finesse lors de la gravure (et donc de la lecture).
Son taux de transfert est de l'ordre de 10 Mbits/s.
Il existe 3 types de DVD réinscriptibles et incompatibles :
- DVD-R (2,6 Go)
- DVD-RAM de Toshiba et Matsushita (3,95 à 4,7 Go)
- DRD-RW de Sony, Philips et HP (4,7 Go)
- les vitesses de gravure des DVD sont de l'ordre de 4x
pour les DVD-R et 2,4x pour les CD-RW. (8x voire 16x prochainement)
Vitesses d'écriture DVD+R DL / DVD-R DL 12x / 12x DVD+R / DVD-R 20x / 20x DVD+RW / DVD-RW 8x / 6x DVD-RAM 12x CD-R 48x CD-RW 32x Vitesses de lecture DVD-ROM 16x DVD-RAM 12x CD-ROM 48x Graveurs Asus DRW-20B1S et DRW-20B1ST - La vitesse de lecture est de 8x, 12x ou 16x (22 Mo/s).
| DVD | Faces | Couches | L/E | Capacité | Audio | Vidéo |
| DVD-5 | 1 | 1 | lecture | 4,7 Go | 9h30m | 2h |
| DVD-9 | 1 | 2 | lecture | 8,5 Go | 17h30 | 4h |
| DVD-10 | 2 | 1 | lecture | 9,4 Go | 19h | 4h30 |
| DVD-18 | 2 | 2 | lecture | 17 Go | 35h | 8h |
| DVD-R | 1 | 1 | une seule écriture | 3,95 à 4,7 Go | 9h30 | 2h |
| DVD-RAM | 1 | 1 | lecture/écriture | 2,6 Go | ? | 1h |
| DVD-RW | 1 | 1 | lecture/écriture | 4,7 Go | ? | 2h |
Afin de mieux contrôler la distribution des DVD, le monde a
été découpé en 6 zones. L'amérique
fait partie de la zone 1 et la France de la zone 2.
Les formats des différentes zones sont incompatibles. Cependant
les lecteurs de DVD pour PC autorise la lecture de DVD par changement
de zone. un maximum de 5 changements est autorisé.
A noter qu'il existe des DVD de salon multizones.
4.10.5 Blu-Ray et HD-DVD
Le Blu-Ray et HD-DVD sont deux nouvelles technologies optiques qui sont les successeurs du DVD. Avec l'introduction de la TV haute définition (HDTV) la capacité de stockage des DVD devient insuffisante. En effet, le DVD supporte une résolution de 720 × 480 pixels, alors que la HDTV fonctionne en 1920 × 1080. Dans ce cas, 2h de TV HD demandent 22 Go d'espace de stockage (bien supérieur au 17 Go des DVD double face, double couche).
Cette technologie a été développée à partir de 2002 par un consortium constitué d'Apple, Dell, Hitahi, HP, Sony, Pioneer, Panasonic, Sharp, Samsung, Philips, TDK, Thomson. Le HD-DVD, quant à lui, a été développé par Microsoft, HP et Intel.
Le média de stockage est toujours un disque optique de 12cm de diamètre, similaire aux CD/DVD, mais utilisant un laser bleu violet de 405 nm et permettant de stocker 27 Go.
Depuis février 2003, les industriels peuvent acheter la licence leur permettant de fabriquer et commercialiser des lecteurs/graveurs BRD.
| Propriété | Blu-Ray | HD-DVD |
| Capacité | 25 / 54 Go (simple/double couche) |
15 / 30 Go (simple/double couche) |
| Codecs | MPEG-2, MPEG-4, AVC, VC-1 | |
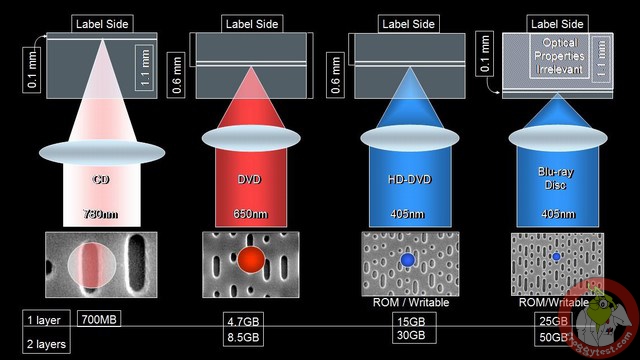
Comparaison CD / DVD /HD-DVD /BRD (Source froggytest.com)
Novembre 2007 Les spécifications du HD DVD 2.0 triple couche permettant de stocker jusqu'à 51 Go de données sur un média HD DVD en utilisant trois couches de stockage sont acceptées. Grâce à cette standardisation, certains fabricants vont commencer à concevoir des disques HD DVD de 51 Go en masse.
En ce qui concerne le gravage :
- pour un CD : 48X
- pour un DVD : 16X
- pour un BRD : 8X (45min pour graver en vitesse 2X)
4.10.6 Le disque holographique (HVD)
La technologie holographique permet de graver les données en 3 dimensions sous forme d'hologramme. L'intérêt est un plus grand gain de stockage. Un HVD possède une capacité maximale théorique de stockage de 3,9 Téra-octects soit 6000 fois la capacité d'un CD-ROM.
On utilise deux lasers (vert et rouge) qui une fois superposés permettent de lire les données par interférences.
Source PC Inpact (14 Février 2007)
InPhase vient de débuter la commercialisation de disques holographiques de 300 Go. Cette méthode de stockage holographique permet d'offrir de très grosses densités de stockage sur des galettes de la taille d'un CD classique, de 1,5 mm d'épaisseur.
La technologie est arrivée sur le marché en fin d'année dernière, sous la forme d'un premier lecteur Tapestry HDS-300R. Ce format est en revanche réservé aux professionnels pour l'instant, le lecteur coûte à lui seul 18 000 dollars, et il faudra débourser 180 dollars par disque de 300 Go.
La technologie est coûteuse, mais très prometteuse. InPhase prévoit des disques de 1600 Go d'ici 2010, avec une durée de vie de 50 ans par disque. Parfait pour un archivage durable de masse, avec des débits de transfert annoncés à 20 Mo/s. Une version réenregistrable du disque holographique devrait aussi arriver dès 2008.